
Contents
What Is The Integrating Process?
Written by Farshad Merrikh Bayat, last updated on September 6, 2022
Integrating process is a process whose output (approximately) equals the integral of its input. More details can be found in the following.
We know from the Laplace transform that integral operator in time domain is equivalent to \(1/s\) in Laplace domain (also called s-domain). When the transfer function of a linear system has a pole at the origin, the output of system in \(s\)-domain also has a pole at the same location. Hence, after partial fraction expansion the term \(A/s\) for some real constant A appears in the output.
It concludes that when the transfer function has a pole at \(s=0\), the output in time domain has a term which increases as the integral of a constant. That is why in the theory of linear control systems a process with a pole at the origin in its transfer function is called “integrating process”. Usually, the transfer function of such a process also has some other stable poles in addition to the pole at the origin.
One important characteristics of any integrating process is that its response to a constant input increases linearly with time at steady state. Two important real world examples of integrating processes are DC motor and a tank containing liquid. To be more precise, consider a DC motor where the DC voltage applied to it is the input of system and the angular position of rotor is its output.
Obviously, if one applies a constant voltage to this DC motor, the angular position of rotor increases linearly with time at steady state, which is a characteristics of an integrating process. Note that the angular velocity of this motor after transient is constant. Hence, in dealing with a certain physical system (DC motor here) depending on the definition of the output of system it may or may not act as an integrating process (defining angular position as output leads to an integrating process but defining angular velocity as output leads to a non integrating process).
Another example of integrating process is a tank containing water and connected to a pump as shown in Figure 1. Here it is assumed that the pump is bidirectional, i.e. it can pump the water in and out of the tank. Clearly, the volume of water in tank equals the integral of the flow over time. Considering the flow as input and the volume of water in tank as output, the transfer function model of process is equal to \(1/s\). As expected, the transfer function of system has a pole at the origin which is a signature of integrating process.
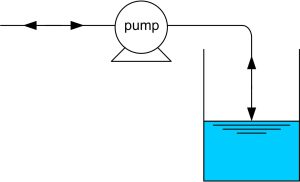
Fig. 1: water tank connected to a pump, an example of integrating process
Similarly, capacitor and inductor are also examples of integrating processes. More precisely, we know that the voltage across capacitor is proportional to the integral of the electric current passes through it over time. Similarly, the electric current passes through inductor is proportional to the integral of the voltage across it over time.
In general, any two physical variables related to each other through the integral or derivative operator (like velocity and displacement of a mass in mechanical systems, voltage and current of inductor and capacitor in electrical systems, level of liquid in a tank and input flow, etc.) can constitute an integrating process.
In practice it is often better to control the given integrating process in a feedback loop by means of a PD controller (but not PI controller) since PI controller usually leads to weak closed loop stability. The reason for this statement can be understood from the root locus plot.
Simulation Without Matlab/Simulink
If you don’t have access to Matlab/Simulink you can use the following websites for simulation of control systems
- Simulator #1 (features: online, unity feedback control system, PID controller in series with a first-order plus time delay – FOPTD – process in the forward path, simulation of the unit step setpoint tracking)
- Simulator #2 (Excel tool to simulate a PID controller on a FOPTD process, open-loop and closed-loop simulations are possible)